Almost there! - Week 4
- Keith Marange

- Feb 22, 2019
- 1 min read
Updated: Mar 6, 2019
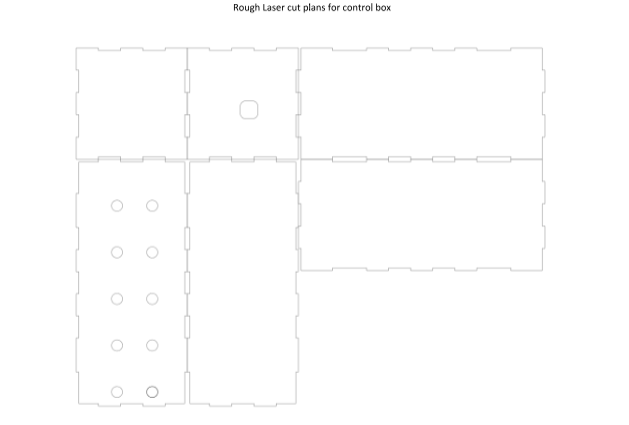
Being the penultimate week, how main focus was getting individual tasks done in preparation for our labs on Friday compared to planning the project and doing team exercises. During the three group meetings we had, we worked on another design of the arm this time being mindful of how the servos will fit in. We then made another design for the control box, so that when we assemble it together they tessellate.
On the labs on Friday, Matthew was able to get all 10 buttons working so the servos move as required. You will be able to see in the above video. One major problem to reach this milestone, was the number of pins on the Arduino being insufficient. Our initial action was an additional veroboard to compensate, however the program was being rather stubborn. The solution for this arose from noting that the adapter for the circuit uses a different library (Code wise) to the Arduino. We overcame this problem by using analog to digital input adapter, thus being able to use 4 more pins for the last 2 buttons. Furthermore the, base of the servo was 3-
D printed.
On to next week!
Keith Marange
Project Manager



Comments